
ໂຄງສ້າງແລະການອອກແບບຂອງຍານພາຫະນະໄຟຟ້າບໍລິສຸດແມ່ນແຕກຕ່າງຈາກເຄື່ອງຈັກການເຜົາໃຫມ້ພາຍໃນແບບດັ້ງເດີມທີ່ຂັບເຄື່ອນໂດຍຍານພາຫະນະ. ມັນຍັງເປັນວິສະວະກໍາລະບົບສະລັບສັບຊ້ອນ. ມັນຈໍາເປັນຕ້ອງໄດ້ປະສົມປະສານເຕັກໂນໂລຊີຫມໍ້ໄຟພະລັງງານ, ເຕັກໂນໂລຊີຂັບ motor, ເຕັກໂນໂລຊີລົດຍົນແລະທິດສະດີການຄວບຄຸມທີ່ທັນສະໄຫມເພື່ອບັນລຸຂະບວນການຄວບຄຸມທີ່ດີທີ່ສຸດ. ໃນແຜນການພັດທະນາວິທະຍາສາດແລະເຕັກໂນໂລຊີຍານພາຫະນະໄຟຟ້າ, ປະເທດຕົນສືບຕໍ່ປະຕິບັດຮູບແບບ R&D ຂອງ "ສາມແນວຕັ້ງແລະສາມແນວນອນ", ແລະຍັງໄດ້ເນັ້ນຫນັກໃສ່ການຄົ້ນຄວ້າກ່ຽວກັບເຕັກໂນໂລຊີທີ່ສໍາຄັນທົ່ວໄປຂອງ "ສາມແນວນອນ" ຕາມຍຸດທະສາດການຫັນເປັນເຕັກໂນໂລຊີ. "ຂັບໄຟຟ້າບໍລິສຸດ", ນັ້ນແມ່ນ, ການຄົ້ນຄວ້າກ່ຽວກັບມໍເຕີຂັບແລະລະບົບການຄວບຄຸມ, ຫມໍ້ໄຟພະລັງງານແລະລະບົບການຄຸ້ມຄອງຂອງມັນ, ແລະລະບົບການຄວບຄຸມໄຟຟ້າ. ຜູ້ຜະລິດລາຍໃຫຍ່ແຕ່ລະຄົນສ້າງຍຸດທະສາດການພັດທະນາທຸລະກິດຂອງຕົນເອງຕາມຍຸດທະສາດການພັດທະນາແຫ່ງຊາດ.
ຜູ້ຂຽນຄັດອອກເຕັກໂນໂລຊີທີ່ສໍາຄັນໃນຂະບວນການພັດທະນາຂອງ powertrain ພະລັງງານໃຫມ່, ສະຫນອງພື້ນຖານທິດສະດີແລະການອ້າງອີງສໍາລັບການອອກແບບ, ການທົດສອບ, ແລະການຜະລິດຂອງ powertrain ໄດ້. ແຜນການດັ່ງກ່າວໄດ້ແບ່ງອອກເປັນສາມບົດເພື່ອວິເຄາະເທັກໂນໂລຍີຫຼັກຂອງການຂັບເຄື່ອນໄຟຟ້າໃນສາຍສົ່ງໄຟຟ້າຂອງຍານພາຫະນະໄຟຟ້າບໍລິສຸດ. ມື້ນີ້, ພວກເຮົາທໍາອິດຈະແນະນໍາຫຼັກການແລະການຈັດປະເພດຂອງເຕັກໂນໂລຊີຂັບເຄື່ອນໄຟຟ້າ.
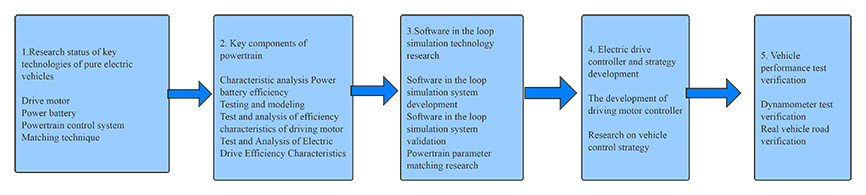
ຮູບທີ 1 ການເຊື່ອມໂຍງທີ່ສໍາຄັນໃນການພັດທະນາ Powertrain
ໃນປັດຈຸບັນ, ເຕັກໂນໂລຊີທີ່ສໍາຄັນຂອງ powertrain ຍານພາຫະນະໄຟຟ້າບໍລິສຸດປະກອບມີສີ່ປະເພດດັ່ງຕໍ່ໄປນີ້:
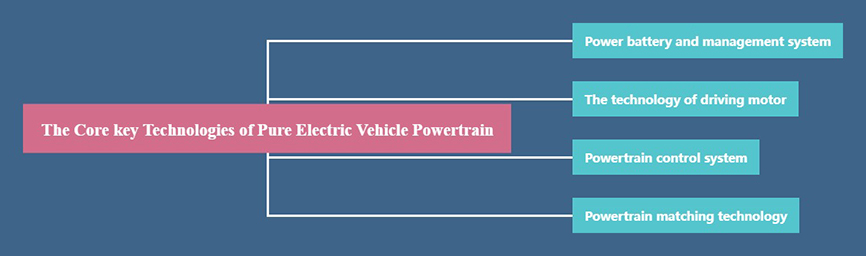
ຮູບທີ 2 ເທັກໂນໂລຢີຫຼັກຂອງ Powertrain
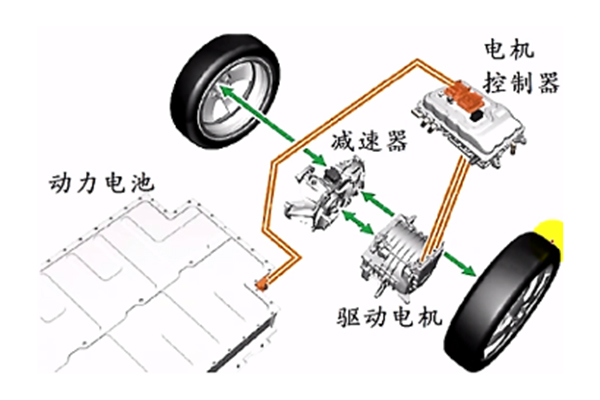
ຄໍານິຍາມຂອງລະບົບມໍເຕີຂັບລົດ
ອີງຕາມສະຖານະຂອງຫມໍ້ໄຟພະລັງງານຍານພາຫະນະແລະຄວາມຕ້ອງການຂອງພະລັງງານຍານພາຫະນະ, ມັນ converts ຜົນຜະລິດພະລັງງານໄຟຟ້າໂດຍອຸປະກອນການເກັບຮັກສາພະລັງງານໃນເຮືອເປັນພະລັງງານກົນຈັກ, ແລະພະລັງງານໄດ້ຖືກສົ່ງກັບລໍ້ຂັບລົດໂດຍຜ່ານອຸປະກອນສົ່ງ, ແລະພາກສ່ວນ. ພະລັງງານກົນຈັກຂອງຍານພາຫະນະຖືກປ່ຽນເປັນພະລັງງານໄຟຟ້າແລະປ້ອນເຂົ້າໄປໃນອຸປະກອນເກັບຮັກສາພະລັງງານໃນເວລາທີ່ຫ້າມລໍ້ຍານພາຫະນະ. ລະບົບຂັບລົດໄຟຟ້າປະກອບມີມໍເຕີ, ກົນໄກການສົ່ງ, ການຄວບຄຸມມໍເຕີແລະອົງປະກອບອື່ນໆ. ການອອກແບບຕົວກໍານົດການດ້ານວິຊາການຂອງລະບົບຂັບລົດພະລັງງານໄຟຟ້າສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍພະລັງງານ, ແຮງບິດ, ຄວາມໄວ, ແຮງດັນ, ອັດຕາສ່ວນການສົ່ງຕໍ່ຂອງການຫຼຸດຜ່ອນ, ຄວາມອາດສາມາດສະຫນອງພະລັງງານ, ພະລັງງານຜົນຜະລິດ, ແຮງດັນ, ປະຈຸບັນ, ແລະອື່ນໆ.

1) ຕົວຄວບຄຸມມໍເຕີ
ເອີ້ນກັນວ່າ inverter, ມັນປ່ຽນກະແສໄຟຟ້າໂດຍກົງໂດຍຊຸດຫມໍ້ໄຟພະລັງງານເຂົ້າໄປໃນກະແສໄຟຟ້າສະຫຼັບ. ອົງປະກອບຫຼັກ:
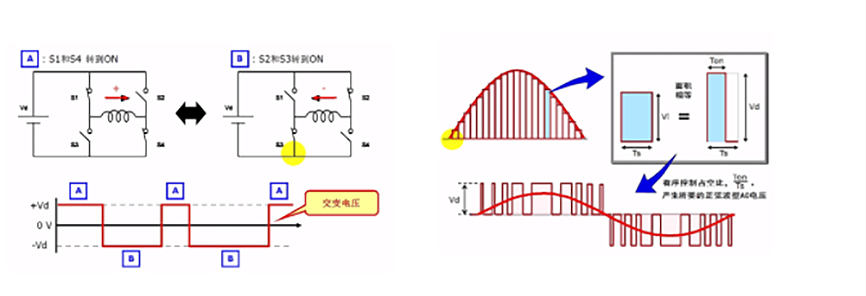
◎ IGBT: ສະວິດອີເລັກໂທຣນິກພະລັງງານ, ຫຼັກການ: ຜ່ານຕົວຄວບຄຸມ, ຄວບຄຸມແຂນຂົວ IGBT ເພື່ອປິດສະວິດຄວາມຖີ່ແລະລໍາດັບທີ່ແນ່ນອນເພື່ອສ້າງກະແສໄຟຟ້າສາມເຟດ. ໂດຍການຄວບຄຸມການສະຫຼັບເອເລັກໂຕຣນິກພະລັງງານທີ່ຈະປິດ, ແຮງດັນສະຫຼັບສາມາດປ່ຽນໄດ້. ຫຼັງຈາກນັ້ນ, ແຮງດັນ AC ແມ່ນຜະລິດໂດຍການຄວບຄຸມວົງຈອນຫນ້າທີ່.
◎ ຄວາມຈຸຂອງຮູບເງົາ: ການທໍາງານຂອງການກັ່ນຕອງ; ເຊັນເຊີປັດຈຸບັນ: ກວດພົບກະແສລົມສາມເຟດ.
2) ວົງຈອນຄວບຄຸມແລະຂັບລົດ: ກະດານຄວບຄຸມຄອມພິວເຕີ, ຂັບລົດ IGBT
ບົດບາດຂອງຕົວຄວບຄຸມມໍເຕີແມ່ນການປ່ຽນ DC ເປັນ AC, ຮັບສັນຍານແຕ່ລະອັນ, ແລະສົ່ງພະລັງງານແລະແຮງບິດທີ່ສອດຄ້ອງກັນ. ອົງປະກອບຫຼັກ: ສະຫຼັບເອເລັກໂຕຣນິກພະລັງງານ, capacitor ຟິມ, ເຊັນເຊີປະຈຸບັນ, ຄວບຄຸມວົງຈອນຂັບເພື່ອເປີດສະຫວິດທີ່ແຕກຕ່າງກັນ, ປະກອບເປັນກະແສໃນທິດທາງທີ່ແຕກຕ່າງກັນ, ແລະສ້າງແຮງດັນໄຟຟ້າສະຫຼັບ. ດັ່ງນັ້ນ, ພວກເຮົາສາມາດແບ່ງກະແສໄຟຟ້າສະຫຼັບ sinusoidal ເປັນສີ່ຫລ່ຽມ. ພື້ນທີ່ຂອງສີ່ຫລ່ຽມຖືກປ່ຽນເປັນແຮງດັນທີ່ມີຄວາມສູງດຽວກັນ. ແກນ x ຮັບຮູ້ການຄວບຄຸມຄວາມຍາວໂດຍການຄວບຄຸມຮອບວຽນຫນ້າທີ່, ແລະສຸດທ້າຍກໍ່ຮັບຮູ້ການປ່ຽນພື້ນທີ່ທຽບເທົ່າ. ດ້ວຍວິທີນີ້, ໄຟຟ້າ DC ສາມາດຄວບຄຸມໄດ້ເພື່ອປິດແຂນຂົວ IGBT ໃນຄວາມຖີ່ແລະລໍາດັບທີ່ແນ່ນອນຜ່ານຕົວຄວບຄຸມເພື່ອສ້າງພະລັງງານ AC ສາມເຟດ.
ໃນປັດຈຸບັນ, ອົງປະກອບທີ່ສໍາຄັນຂອງວົງຈອນໄດແມ່ນອີງໃສ່ການນໍາເຂົ້າ: capacitors, ທໍ່ສະຫຼັບ IGBT / MOSFET, DSP, ຊິບເອເລັກໂຕຣນິກແລະວົງຈອນປະສົມປະສານ, ເຊິ່ງສາມາດຜະລິດເປັນເອກະລາດແຕ່ມີຄວາມສາມາດອ່ອນແອ: ວົງຈອນພິເສດ, ເຊັນເຊີ, ຕົວເຊື່ອມຕໍ່, ເຊິ່ງສາມາດເປັນ. ຜະລິດເປັນເອກະລາດ: ການສະຫນອງພະລັງງານ, diodes, inductors, ກະດານວົງຈອນ multilayer, ສາຍ insulated, radiators.
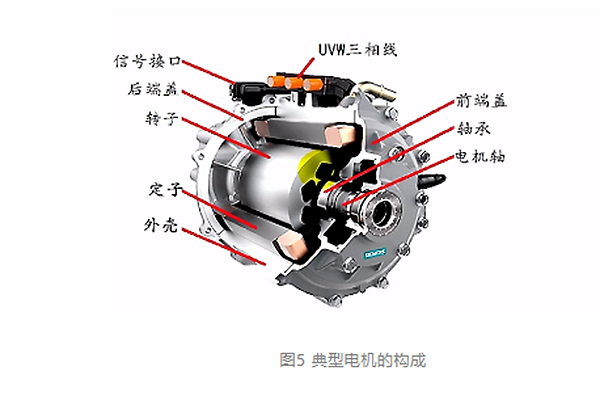
3) ມໍເຕີ: ປ່ຽນກະແສໄຟຟ້າສາມເຟດເປັນເຄື່ອງຈັກ
◎ ໂຄງສ້າງ: ການປົກຫຸ້ມດ້ານຫນ້າແລະດ້ານຫລັງ, ແກະ, shafts ແລະ bearings
◎ ວົງຈອນແມ່ເຫຼັກ: stator core, rotor core
◎ ວົງຈອນ: stator winding, rotor conductor
4) ອຸປະກອນສົ່ງ
ກ່ອງເກຍ ຫຼືຕົວຫຼຸດຈະປ່ຽນຄວາມໄວແຮງບິດທີ່ສົ່ງຜົນອອກໂດຍມໍເຕີໄປສູ່ຄວາມໄວ ແລະແຮງບິດທີ່ຕ້ອງການຂອງລົດທັງໝົດ.
ປະເພດຂອງມໍເຕີຂັບລົດ
ມໍເຕີຂັບລົດໄດ້ຖືກແບ່ງອອກເປັນສີ່ປະເພດດັ່ງຕໍ່ໄປນີ້. ໃນປັດຈຸບັນ, ມໍເຕີ induction AC ແລະມໍເຕີ synchronous ແມ່ເຫຼັກຖາວອນແມ່ນປະເພດທົ່ວໄປທີ່ສຸດຂອງຍານພາຫະນະໄຟຟ້າພະລັງງານໃຫມ່. ດັ່ງນັ້ນພວກເຮົາສຸມໃສ່ເຕັກໂນໂລຢີຂອງມໍເຕີ induction AC ແລະມໍເຕີ synchronous ສະກົດຈິດຖາວອນ.
| DC Motor | AC Induction Motor | ມໍເຕີ synchronous ແມ່ເຫຼັກຖາວອນ | ສະຫຼັບມໍເຕີ Reluctant | |
| ຂໍ້ໄດ້ປຽບ | ຄ່າໃຊ້ຈ່າຍຕ່ໍາ, ຄວາມຕ້ອງການຕ່ໍາຂອງລະບົບການຄວບຄຸມ | ຄ່າໃຊ້ຈ່າຍຕ່ໍາ, ການຄຸ້ມຄອງພະລັງງານທີ່ກວ້າງຂວາງ, ເຕັກໂນໂລຢີການຄວບຄຸມທີ່ພັດທະນາ, ຄວາມຫນ້າເຊື່ອຖືສູງ | ຄວາມຫນາແຫນ້ນຂອງພະລັງງານສູງ, ປະສິດທິພາບສູງ, ຂະຫນາດນ້ອຍ | ໂຄງສ້າງງ່າຍດາຍ, ຄວາມຕ້ອງການຕ່ໍາຂອງລະບົບການຄວບຄຸມ |
| ຂໍ້ເສຍ | ຄວາມຕ້ອງການບໍາລຸງຮັກສາສູງ, ຄວາມໄວຕ່ໍາ, ແຮງບິດຕ່ໍາ, ຊີວິດສັ້ນ | ພື້ນທີ່ປະສິດທິພາບຂະຫນາດນ້ອຍຄວາມຫນາແຫນ້ນຂອງພະລັງງານຕ່ໍາ | ຄ່າໃຊ້ຈ່າຍສູງການປັບຕົວສິ່ງແວດລ້ອມທີ່ບໍ່ດີ | ການເຫນັງຕີງຂອງແຮງບິດຂະຫນາດໃຫຍ່, ສຽງລົບກວນການເຮັດວຽກສູງ |
| ຄໍາຮ້ອງສະຫມັກ | ຍານພາຫະນະໄຟຟ້າຄວາມໄວຕໍ່າຂະໜາດນ້ອຍ ຫຼືຂະໜາດນ້ອຍ | ພາຫະນະທຸລະກິດໄຟຟ້າ ແລະ ລົດໂດຍສານ | ພາຫະນະທຸລະກິດໄຟຟ້າ ແລະ ລົດໂດຍສານ | ພາຫະນະປະສົມ |
 1) AC Induction Asynchronous Motor
1) AC Induction Asynchronous Motor
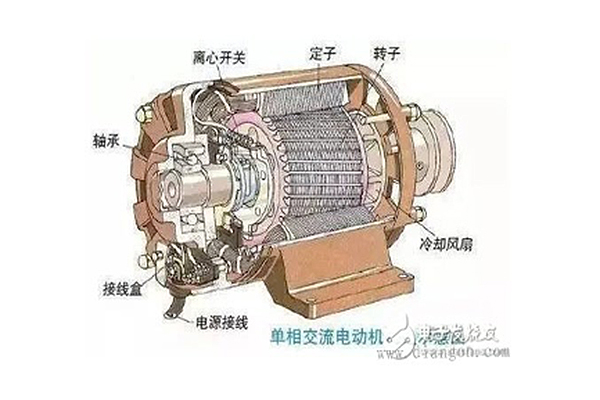
ຫຼັກການການເຮັດວຽກຂອງມໍເຕີ asynchronous AC inductive inductive ແມ່ນວ່າ winding ຈະຜ່ານຊ່ອງ stator ແລະ rotor ໄດ້: ມັນຖືກ stacked ໂດຍແຜ່ນເຫຼັກບາງໆທີ່ມີສະນະແມ່ເຫຼັກສູງ. ໄຟຟ້າສາມເຟດຈະຜ່ານ winding. ອີງຕາມກົດຫມາຍການ induction ແມ່ເຫຼັກໄຟຟ້າຂອງ Faraday, ພາກສະຫນາມແມ່ເຫຼັກ rotating ຈະໄດ້ຮັບການຜະລິດ, ຊຶ່ງເປັນເຫດຜົນວ່າເປັນຫຍັງ rotor rotates. ສາມ coils ຂອງ stator ແມ່ນເຊື່ອມຕໍ່ໃນໄລຍະຫ່າງຂອງ 120 ອົງສາ, ແລະ conductor ປະຈຸບັນສາມາດສ້າງສະຫນາມແມ່ເຫຼັກອ້ອມຮອບເຂົາເຈົ້າ. ໃນເວລາທີ່ການສະຫນອງພະລັງງານສາມເຟດຖືກນໍາໃຊ້ກັບການຈັດການພິເສດນີ້, ພາກສະຫນາມແມ່ເຫຼັກຈະມີການປ່ຽນແປງໃນທິດທາງທີ່ແຕກຕ່າງກັນກັບການປ່ຽນແປງຂອງກະແສໄຟຟ້າສະຫຼັບໃນເວລາສະເພາະໃດຫນຶ່ງ, ການຜະລິດສະຫນາມແມ່ເຫຼັກທີ່ມີຄວາມຫນາແຫນ້ນຂອງພືດຫມູນວຽນເປັນເອກະພາບ. ຄວາມໄວການຫມຸນຂອງສະຫນາມແມ່ເຫຼັກເອີ້ນວ່າຄວາມໄວ synchronous. ສົມມຸດວ່າຕົວນໍາປິດຖືກວາງໄວ້ພາຍໃນ, ຕາມກົດຫມາຍຂອງ Faraday, ເນື່ອງຈາກວ່າສະຫນາມແມ່ເຫຼັກແມ່ນການປ່ຽນແປງ, loop ຈະຮູ້ສຶກວ່າຜົນບັງຄັບໃຊ້ໄຟຟ້າ, ເຊິ່ງຈະສ້າງປະຈຸບັນໃນ loop ໄດ້. ສະພາບການນີ້ກໍຄືກັນກັບການໝູນວຽນຢູ່ໃນສະໜາມແມ່ເຫຼັກໃນປະຈຸບັນ, ເຮັດໃຫ້ກຳລັງແມ່ເຫຼັກໄຟຟ້າຢູ່ໃນວົງແຫວນ, ແລະ ຮວນຈຽງເລີ່ມຫມູນວຽນ. ການນໍາໃຊ້ບາງສິ່ງບາງຢ່າງທີ່ຄ້າຍຄືກັນກັບ cage ກະຮອກ, ເປັນສາມໄລຍະສະລັບກັນຈະຜະລິດສະຫນາມແມ່ເຫຼັກ rotating ຜ່ານ stator, ແລະປະຈຸບັນຈະໄດ້ຮັບການ induced ໃນແຖບ cage ກະຮອກສັ້ນໂດຍວົງສຸດທ້າຍ, ສະນັ້ນ rotor ເລີ່ມຫມຸນ, ເຊິ່ງແມ່ນ. ເປັນຫຍັງມໍເຕີເອີ້ນວ່າມໍເຕີ induction. ດ້ວຍຄວາມຊ່ອຍເຫລືອຂອງ induction ແມ່ເຫຼັກໄຟຟ້າແທນທີ່ຈະເຊື່ອມຕໍ່ໂດຍກົງກັບ rotor ເພື່ອ induce ໄຟຟ້າ, insulating flakes ຫຼັກທາດເຫຼັກແມ່ນເຕັມໄປດ້ວຍໃນ rotor ໄດ້, ດັ່ງນັ້ນທາດເຫຼັກຂະຫນາດຂະຫນາດນ້ອຍຮັບປະກັນການສູນເສຍ eddy ຕ່ໍາສຸດໃນປະຈຸບັນ.
2) AC synchronous motor
rotor ຂອງມໍເຕີ synchronous ແມ່ນແຕກຕ່າງຈາກ motor asynchronous. ການສະກົດຈິດຖາວອນໄດ້ຖືກຕິດຕັ້ງຢູ່ເທິງ rotor, ເຊິ່ງສາມາດແບ່ງອອກເປັນປະເພດຕິດຢູ່ດ້ານແລະປະເພດຝັງ. rotor ແມ່ນເຮັດດ້ວຍແຜ່ນເຫຼັກຊິລິໂຄນ, ແລະແມ່ເຫຼັກຖາວອນໄດ້ຖືກຝັງໄວ້. stator ຍັງເຊື່ອມຕໍ່ກັບກະແສໄຟຟ້າສະຫຼັບທີ່ມີຄວາມແຕກຕ່າງກັນໄລຍະ 120, ເຊິ່ງຄວບຄຸມຂະຫນາດແລະໄລຍະຂອງຄື້ນ sine alternating ປັດຈຸບັນ, ດັ່ງນັ້ນພາກສະຫນາມແມ່ເຫຼັກທີ່ຜະລິດໂດຍ stator ແມ່ນກົງກັນຂ້າມກັບທີ່ຜະລິດໂດຍ rotor, ແລະແມ່ເຫຼັກ. ພາກສະຫນາມກໍາລັງຫມຸນ. ດ້ວຍວິທີນີ້, stator ຖືກດຶງດູດໂດຍແມ່ເຫຼັກແລະ rotates ກັບ rotor. ວົງຈອນຫຼັງຈາກວົງຈອນແມ່ນຜະລິດໂດຍການດູດຊຶມ stator ແລະ rotor.
ສະຫຼຸບ: ການຂັບເຄື່ອນມໍເຕີສໍາລັບຍານພາຫະນະໄຟຟ້າໄດ້ໂດຍພື້ນຖານໄດ້ກາຍເປັນຫຼັກ, ແຕ່ວ່າມັນບໍ່ແມ່ນດຽວແຕ່ມີຄວາມຫຼາກຫຼາຍ. ລະບົບຂັບມໍເຕີແຕ່ລະຄົນມີດັດຊະນີທີ່ສົມບູນແບບຂອງຕົນເອງ. ແຕ່ລະລະບົບແມ່ນໃຊ້ໃນການຂັບຂີ່ລົດໄຟຟ້າທີ່ມີຢູ່ແລ້ວ. ສ່ວນໃຫຍ່ຂອງພວກເຂົາແມ່ນມໍເຕີ asynchronous ແລະມໍເຕີ synchronous ສະກົດຈິດຖາວອນ, ໃນຂະນະທີ່ບາງຄົນພະຍາຍາມສະຫຼັບ motors reluctance. ມັນເປັນມູນຄ່າທີ່ຊີ້ໃຫ້ເຫັນວ່າ motor drive ປະສົມປະສານເຕັກໂນໂລຊີເອເລັກໂຕຣນິກພະລັງງານ, ເຕັກໂນໂລຊີ microelectronics, ເຕັກໂນໂລຊີດິຈິຕອ, ເຕັກໂນໂລຊີການຄວບຄຸມອັດຕະໂນມັດ, ວິທະຍາສາດວັດສະດຸແລະລະບຽບວິໄນອື່ນໆເພື່ອສະທ້ອນໃຫ້ເຫັນການນໍາໃຊ້ທີ່ສົມບູນແບບແລະຄວາມສົດໃສດ້ານການພັດທະນາຂອງຫຼາຍວິໄນ. ມັນເປັນຄູ່ແຂ່ງທີ່ເຂັ້ມແຂງໃນມໍເຕີຍານພາຫະນະໄຟຟ້າ. ເພື່ອຄອບຄອງສະຖານທີ່ໃນຍານພາຫະນະໄຟຟ້າໃນອະນາຄົດ, ມໍເຕີທຸກປະເພດຕ້ອງການບໍ່ພຽງແຕ່ປັບປຸງໂຄງສ້າງມໍເຕີ, ແຕ່ຍັງເພື່ອຄົ້ນຫາລັກສະນະອັດສະລິຍະແລະດິຈິຕອນຂອງລະບົບຄວບຄຸມຢ່າງຕໍ່ເນື່ອງ.
ເວລາປະກາດ: ມັງກອນ-30-2023


